SEOUL, August 06 (AJP) - A KAIST research team has developed a new kind of robotic material that can fold itself in real time, changing its shape and function instantly without the need for reconstruction. The innovation combines physical artificial intelligence with real-time programmability and could lead to a new class of autonomous robots capable of adapting to their surroundings.
KAIST announced Wednesday that Professors Kim Jeong and Park In-kyu of the Department of Mechanical Engineering have developed what they call a "field-programmable robotic folding sheet." Unlike traditional foldable structures that require pre-designed hinges and fixed directions, this new material allows users to change folding patterns and shapes through simple software commands. The team expects it to have applications in autonomous robotics, space exploration, and emergency response.
Folding structures have long been used in robotics due to their intuitive and efficient ability to alter shape. However, conventional mechanisms are limited by their fixed designs, which require a new structure each time the task or environment changes. The KAIST team addressed this limitation by developing a system that lets users reprogram fold positions and directions in real time, using a single, reusable material.
The robotic sheet is made from a thin, flexible polymer embedded with a fine network of metallic resistors. These resistors serve dual functions as both heaters and temperature sensors. This allows the sheet to monitor and control its folding state without the need for external hardware.
By integrating software powered by genetic algorithms and deep neural networks, users can input the desired fold locations, directions, and intensity. The sheet then responds autonomously by heating and cooling itself to generate the exact programmed shape. Feedback from the built-in sensors ensures the process is continuously adjusted for accuracy.
The researchers also applied a closed-loop temperature control system, which improves real-time folding precision and compensates for changes in the environment. They reported that the system resolves one of the key limitations of heat-based folding technology, which is slow reaction time.
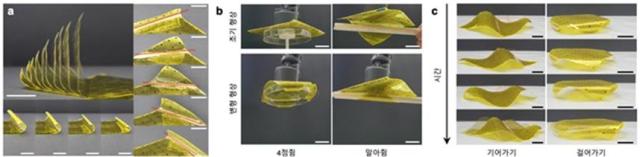
This kind of programmable shape-shifting allows a single sheet to take on multiple robotic roles without physical redesign. The team demonstrated an adaptive robotic gripper that can modify its grip depending on the shape of the object it holds. In another demonstration, the same sheet was laid flat on a surface and reprogrammed to walk or crawl, imitating biological motion. These results suggest potential for real-time environment-adaptive robots.
"This research takes us one step closer to what we call 'morphological intelligence,' where the robot’s shape becomes part of its intelligence," said Professor Kim. "We plan to improve the material’s load-bearing capacity, develop faster cooling, and create integrated electrode designs without wiring. Our long-term goal is to develop this into a next-generation physical AI platform that can be applied to disaster response, personalized medical devices, and space exploration."
The study was led by Dr. Park Hyun-kyu, now at Samsung Advanced Institute of Technology, and Professor Jung Yong-rok, now at Kyungpook National University. They served as co-first authors of the paper, which was published in the August 2025 online edition of Nature Communications.
The research was supported by the National Research Foundation of Korea under the Ministry of Science and ICT.

Copyright ⓒ Aju Press All rights reserved.